Инженеры из MIT (Массачусетский технологический институт) добились значительного прогресса в разработке роботов, отказавшись от жестких механизмов в пользу более мягких, напоминающих настоящую мышечную ткань. Иными словами, они разработали метод создания искусственных мышц, способных сгибаться в различных направлениях.
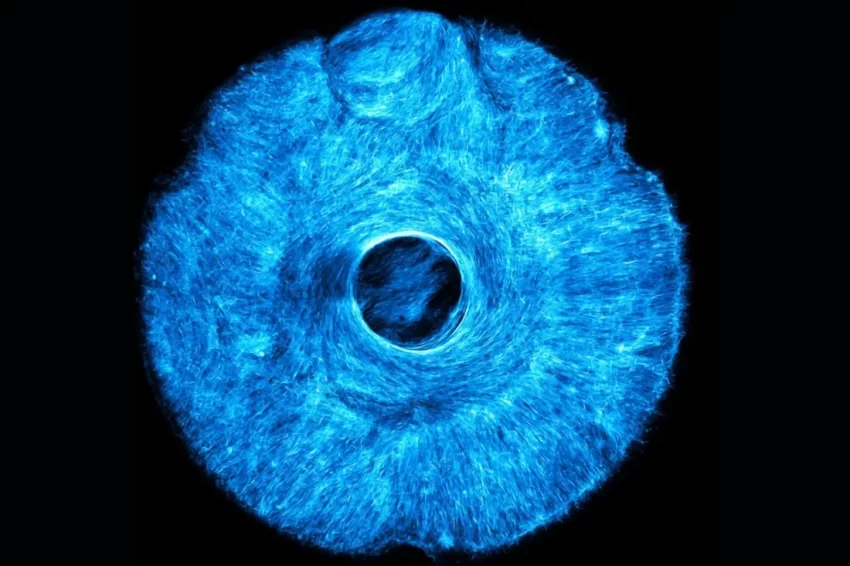
Для достижения этой цели была разработана новая технология штамповки, позволяющая печатать на 3D-принтере микроскопические канавки в мягком геле. Процесс довольно сложен, но в упрощенном виде он выглядит так: мышечные клетки, помещенные на гель, размещаются вдоль бороздчатых узоров.
«Мы считаем, что создали первого робота, приводимого в движение скелетными мышцами и генерирующего силу более чем в одном направлении», — заявила Риту Раман, инженер по тканям из Массачусетского технологического института. «Это стало возможным благодаря инновационному подходу к штамповке».
Не обошлось и без трудностей. В частности, гель оказался чрезвычайно хрупким. Раман пояснила, что он гораздо мягче желе и его сложно формировать, так как он легко рвется. Преодоление этой проблемы потребовало множества проб и ошибок, но результат оправдал усилия.
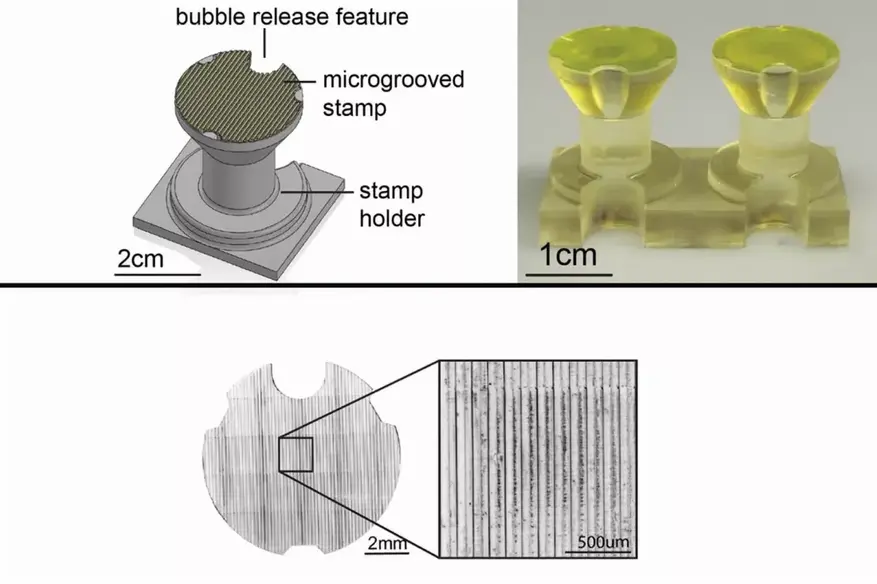
Технология штамповки отличается высокой универсальностью, позволяя исследователям фактически «проектировать» любую желаемую мышечную структуру, просто задавая узор канавок на штампе. Сами штампы можно изготавливать с использованием стандартного настольного 3D-принтера.
Такая гибкость открывает широкий спектр возможностей, позволяя исследователям воссоздавать широкий спектр мышечных движений: от закручивающихся сокращений сердечной мышцы до спиральных движений пищеварительного тракта.
В будущем команда планирует экспериментировать с различными схемами и типами клеток. Когда инженеры-робототехники начнут интегрировать эти программируемые биоткани в конструкции, это может открыть новую эру в машиностроении.
Источник:
techspot